Правила ввода функции
- Примеры
 ≡ x^2/(1+x)
≡ x^2/(1+x)
cos 2 (2x+π) ≡ (cos(2*x+pi))^2≡ x+(x-1)^(2/3)
На рис.1а, 1б в окрестности корня |φ′(x)| 1, то процесс итерации может быть расходящимся (см. рис.2).
Достаточные условия сходимости метода итерации
Процесс нахождения нулей функции методом итераций состоит из следующих этапов:
- Получить шаблон с омощью этого сервиса.
- Уточнить интервалы в ячейках B2 , B3 .
- Копировать строки итераций до требуемой точности (столбец D ).
Примечание: столбец A — номер итерации, столбец B — корень уравнения X , столбец C — значение функции F(X) , столбец D — точность eps .
Метод последовательных приближений применяется для решения уравнений илисистем уравнений в случаях, когда искомые параметры не могут быть выражены в явном виде. В общем случае будем предполагать, чтоимеется некоторая функцияF(x) и необходимо найти такие значения аргументах, для которых
Функция F(x) может иметь какой угодно вид, она может быть алгебраической или трансцендентной, единственное, что будем предполагать — это ее дифференцируемость.
В общем случае функции, которыми оперируют в задачах системных исследований, не имеют аналитических формул для своих корней. Поэтому приходится пользоваться приближенными методами нахождения корней, которые в основном состоят из двух этапов:
нахождение приближенного значения корня;
уточнение приближенного значения до некоторой заданной степениточности.
Приближенное значение корня уравнения F(x) = 0 часто бывает известно из физических соображений. Если это значение неизвестно, его можно найти с помощью грубого анализа функции. В качестве рекомендации можно предложить следующий метод. Определяются два такие значениях, для которыхF(x) имеет противоположные знаки, т.е. определяются такиеX t иX., для которых
На втором шаге в качестве приближения возьмем
Продолжая этот процесс дальше, в качестве п-то приближения принимаем значение
Процедура повторяется до тех пор, пока не будет достигнута заданная точность решения уравнения. Правило остановки можно задать следующим образом: вычислительный процесс заканчивается, когда выполняется соотношение |хп— хп,1
Задавая вектор начального приближения (х°,х°), находим первые приближенные оценки:
Повторяем эту процедуру до тех пор, пока разность (|х"- хГ‘|,|х2"-х2"‘|)не попадает вє-окрестность. Иными словами, должны совместно выполняться соотношения:
В [8] доказано, что наилучшая сходимость достигается в случае, когда параметр а вычисляется следующим образом:
Метод Ньютона-Рафсона. Метод основан на разложении функции F(x) в окрестностиа
Произведем элементарные преобразования в данном уравнении, получим
Заменим искомый параметр его первым приближением, получим
Далее организуем итеративный процесс
Если начальное приближение хвыбрано близко к корню уравнения
и если производная F’(x) для/= 1,2. не равна нулю, то последовательность, порожденная соотношением(12.3) сходится ка.
Задачи, в которых требуется вычислить интегралы, возникают на разных этапах решения задач системного анализа. Иногда удается найти аналитическую формулу, т.е. выразить неопределенный интеграл в виде комбинаций алгебраических и трансцендентных функций, после чего остается вычислить значение определенного интеграла, подставив в формулу пределы интегрирования.
В большинстве случаев не удается найти никакой аналитической формулы или же она получается настолько сложной, что вычислять интеграл с ее помощью труднее, чем другими способами. В таких ситуациях приходится применять различные методы численного интегри-
рования, которые основаны на том, что интеграл представляется в виде предела суммы площадей. Далее вычисляют эту сумму с достаточно высокой степеньюточности.
Рассмотрим постановку задачи. Пусть необходимо вычислить определенный интеграл
при условии, чтоаиЪконечныи/(х)является непрерывной функцией
во всем интервале а
Метод прямоугольников. Пусть интервал [а, Ьразбит на множество подынтервалов [х., х.+1). Будем считать, что на рассматриваемом подынтервале интегрируемая функция почти константа:f(x)
(х —х)/(Q, гдеС, —произвольная точка на рассматриваемом подынтервале. Если в качестве такой точки взять среднюю точку подынтервала, получим формулу
Далее, производя суммирование по всем подынтервалам, получим формулу интегрирования по методу прямоугольников
где п— количество подынтервалов на отрезке интегрирования.
Метод трапеций. В отличие от метода прямоугольников, где предполагалось, что интегрируемая функция на каждом подынтервале близка к константе, в методе трапеций принимается допущение, что функция на каждом подынтервале может быть приближена линейной функцией. При таком предположении интеграл заменяется площадью трапеции с высотой (х.+1—х.)и основаниями/ (х.+1) и /(х). В результате получим формулу трапеций
На рис. 12.1 приведена иллюстрация рассмотренных методов интегрирования путем замены определенного интеграла конечной суммой, а именно показано увеличенное представление элемента площади, ограниченной функцией/(jc), осьюхи прямымиX = X. их = х.+гПунктирной линией выделена трапеция, которой заменяется площадь под кривой интегрирования. В центре отрезка тонкой прямой линией отмечена высота прямоугольника, которая используется в качестве сомножителя в методе прямоугольников.
Ошибка интегрирования методом трапеций. При интегрировании с использованием формулы (12.5) возникает ошибка, равная сумме площадей между кривойу= f(x) и хордами, соединяющими точкиу.=/(jc )иу= /(х.+|). Оценим ошибку, разлагая функциюу = f (х)в ряд Тейлора в точкахjc. иX1 .Это разложение позволит получить уравнение исходной кривой в виде, удобном для сравнения точного значения интеграла с приближенным, вычисленным по формуле(12.5).
Рассмотрим разложение функции у= f(x) в ряд Тейлора в окрестности точкиjc = Jt, Предположим, что интегрируемая функция имеет
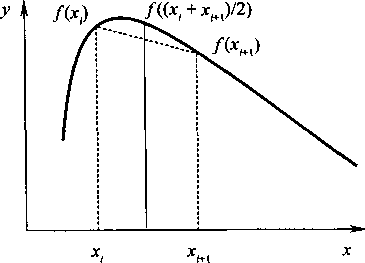
Рис. 12.1. Иллюстрация численного интегрирования методом трапеций
столько производных,сколько может потребоваться.
Аналогично разложим данную функцию в ряд в окрестности точки дс,получим
Обозначим длину подынтервала через А, т.е. A= дс Х ‘—fxi+,) + -. (12.8) Найдем среднее из обеих представлений(12.6) и(12.8)
Для малых h первый член гораздо больше всех остальных, поэтому ошибка именно им и определяется. Более того, в[8] показано, что за счет наличия в выражении слагаемых с производными более высокого порядка ошибка определяется следующим образом
Полную ошибку интегрирования методом трапеций можно оценить следующим соотношением
Усовершенствованный метод трапеций. Попытаемся найти более точное значение интеграла. Для этого произведем сравнительно простое усовершенствование метода трапеций. Рассмотрим ошибку (12.11) и преобразуем данную формулу. На основании теоремы о среднем значении можно написать
Предположим теперь, что вторая производная от интегрируемой функции является константой, тогда и Сбудет константой.
Выберем другую величину шага разбиения отрезка интегрирования к = (Ь -а)/т,причемтФп.Тогда получим выражение для ошибки интегрирования в виде
Запишем далее значение интеграла, вычисленное по правилу трапеций с шагом h -Ih и с шагомк — 1к.Тогда будут справедливы следующие выражения
Приравняем эти два уравнения друг другу и решим их относительно С, получим
Подставляя это выражение в (12.12), получим
Вычисленное таким образом значение интеграла является лучшим приближением, чем любое представление, полученное в (12.12). Если же вторая производная интегрируемой функции действительно постоянна на интервале интегрирования[а, Ь],то ошибка в формуле(12.13) равна нулю.
Правило Симпсона. Способ интегрирования по правилу Симпсона наиболее широко известный и применяемый метод численного интегрирования. В данном методе, так же как и в рассмотренных ранее, интегрирование производится путем разбиения общего интервала интегрирования на множество более мелких отрезков. Однако в этом методе для вычисления площади над каждым из отрезков через три последовательных ординаты разбиения проводится квадратичная парабола. Рассмотрим процедуру получения формулы Симпсона. Пусть, как н ранее, п —количество отрезков разбиения интервала интегрирования;h — ширина интервала разбиения. Предположим, что числоп является четным. Пустьк —ширина интервала при другом разбиении, такая, чток = 2А. Тоща можно записать
Преобразуем выражение (12.13) учитывая, чток = 2А, получим
Приведем подобные члены
Подставим данное выражение формулы (12.14) и(12.15), окончательно получим
Данная формула называется формулой Симпсона. Ошибка при интегрировании с помощью формулы Симпсона равна
Как видно из данного выражения ошибка пропорциональна значению А 4 ,в то время как для метода трапеций она была пропорциональнаА 2 .Это означает, что формула Симпсона соответствует ряду Тейлора с точностью до членов третьего порядка, а метод трапеций соответствует этому рядутолько сточностьюдо членов первого порядка. Поэтому при интегрировании многочленов степени не выше третьего порядка метод Симпсона дает точные значения интеграла.
Вычисление интегралов с бесконечными пределами. Рассмотрим еще одну важную задачу численного интегрирования — вычисление определенного интеграла для случая, когда один или оба предела интегрирования равны бесконечности. Таким образом, предметом рассмотрения будет вычисление одногоиз следующих выражений
Поскольку вычислительная техника не работает с такими понятиями как бесконечность, то задача аналитика состоит в том, чтобы заменить бесконечность реальным числом, обеспечив приэтом приемлемую точность вычисления. Иными словами, необходимо найти такие числаАиВ,для которых были бы справедливы выражения
Одной из целей этого метода состоит в нахождении приближенных решений уравнений. Одним из таких методов является метод простой итерации.
Метод простой итерации
Метод простой итерации — один из самых простейших численных методов для решения уравнений.
Идея метода простой итерации.
Пусть нам необходимо решить уравнение $fleft(x
ight)=0$.
Вначале для его решения приведем его к эквивалентному уравнению вида
Рассмотрим пример такого приведения:
Привести уравнение $
Решение.
Здесь есть три способа такого преобразования:
После этого каким-либо образом выбирается начальное приближение $x_0$, вычисляется значение $varphi (x_0)$ и находится уточненное значение $x_1=varphi (x_0)$. Следующее уточненное значение будет находиться как $x_2=varphi (x_1)$ и т.д. Каждый такой шаг называется шагом итерации.
Попробуй обратиться за помощью к преподавателям
Сформулируем и докажем следующую теорему:
Функция $varphi (x)$ определена и дифференцируема на отрезке $[a,b]$ и $varphi (x)in [a,b]$. Тогда, если extbar $<varphi >’left(x
ight)|
Процесс итерации $x_n=varphi (x_)$ сходится независимо от начального положения $x_0$;
$<mathop
Доказательство.
item Так как $X=varphi (x)$ и $x_n=varphi (x_)$, то
[x_n-X=varphi left(x_ight)-varphi left(x
ight)=left(varphi left(x_
ight)-varphi left(x
ight)
ight)frac-x>-x>=] [=frac<varphi left(x_
ight)-varphi left(x
ight)>-x>cdot x_-x]
По теореме о среднем, получаем
Пусть $M=max |<varphi >’left(x
ight)|$, тогда $|x_n-X|le M|x_-x|$. Также$|x_-X|le M|x_-x|$. Но тогда получим
ight|le Mleft|x_-x
ight|le M^2left|x_-x
ight|и т.д.]
То есть получим, что
Следовательно, для того чтобы метод сходился нужно, чтобы $M=max |<varphi >’left(x
ight)|$ было меньше единицы, значит $left|<varphi >’left(x
ight)
ight|
Рассмотрим $x_n=varphi (x_)$ и $x_=varphi (x_n)$.
[x_-x_n=varphi left(x_night)-varphi (x_)]
По теореме о среднем $x_-x_n=f’left(x_n
ight)(x_n-x_)$.
Так как $left|<varphi >’left(x
ight)
ight|le q
Рассмотрим теперь $fleft(x
ight)=x-varphi left(x
ight)$, $f^<‘left(x
ight)>=1-<varphi >^<‘left(x
ight)>ge 1-q$. Значит, $left|x_n-varphi left(x_n
ight)
ight|=left|fleft(x_n
ight)-fleft(X
ight)
ight|=left|x_n-X
ight|left|f’left(x_n
ight)
ight|ge left(1-q
ight)|x_n-X|$. Следовательно, $|x_n-X|le frac<left|x_n-varphi left(x_n
ight)
ight|><1-q>le frac<|x_-x_n|><1-q>$.
Из двух полученных неравенств, имеем
Пусть $|x_n-X|le varepsilon $, тогда $x_0,x_1,dots ,x_n$ нужно вычислять до тех пор, пока не выполнится неравенство $|x_n-x_|le frac<varepsilon (1-q)>$, тогда получим, что $X=x_npm varepsilon $. Отсюда следует, что $X$ корень уравнения $x=varphi (x)$, то есть $X=varphi (X)$.
Предположим, что это уравнение имеет еще один корень $X’=varphi left(X’
ight)$. Отсюда $X’-X=varphi left(X’
ight)-varphi left(X
ight)$, тогда $left(X’-X
ight)left|1-<varphi >’left(C
ight)
ight|=0$. Значит $X’=X$.
Задай вопрос специалистам и получи
ответ уже через 15 минут!
Теорема доказана.
Из теоремы будет вытекать погрешность метода простой итерации. Она определяется следующей формулой:
Также из нее можно выделить критерий окончания метода простой итерации. Он говорит, что процесс итерации необходимо продолжать до выполнения следующего неравенства:
Рассмотрим теперь на примере использование метода простой итерации.
Решить уравнение $sinx-x^2=0$ с точностью до $varepsilon =0,001$.
Решение.
Вначале приведем уравнение к виду $x=varphi (x)$.
Очевидно, что корень уравнения находит на отрезке $left[frac<pi ><6>,frac<pi ><3>
ight]$.
Найдем $varphi (x)$:
Она возрастает на отрезке $left[frac<pi ><6>,frac<pi ><3>
ight]$, следовательно принимает максимальное значение, при $x=frac<pi ><3>$. $left|<varphi >’left(x
ight)
ight|le left|<varphi >’left(frac<pi ><3>
ight)
ight|approx 0,312$.
Условие выполняется, $q [|x_n-x_|le varepsilon ]
Это неравенство выполнится на 5 шаге.
Приведем таблицу промежуточных решений, взяв за $x_0$ единицу:
Ответ: приближенное значение с заданной точностью — $0,8765$.
Так и не нашли ответ
на свой вопрос?
Просто напиши с чем тебе
нужна помощь

